技术描述
一、主机
1.1仪器组成
关节臂测量机工作时由固定平台、磁性表座(或吸盘、三脚架)、测量机主机、电脑及软件、测头几部分组成。测量时必须稳定固定在平台上(不要求水平但要求整个测量过程保持测量机及被测工件的相对位置稳定),测量机主机通过吸盘或螺钉固定,便携式计算机(不限于)通过USB信号线连接主机,软件完成测量数据采集和处理并生成测量报告。
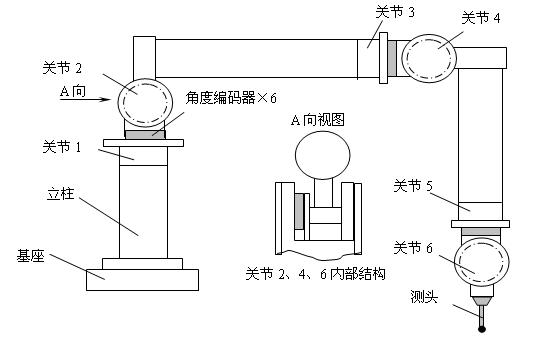
1.2测量原理
关节臂测量机由三根钢体臂、六个活动关节和一个测头组成。三根臂相互连接,其中一个为固定臂,它安装在任意基座上,以支撑测量机所有部件,另外两个活动臂可运动于空间任意位置,以适应测量需要,其中一个为中间臂,一个为末端臂并在此尾端安装测头。第一根固定臂与第二根中间臂之间、第二根与第三根末端臂之间、第三根与接触测头之间均为关节式连接,可作空间回转,而每个活动关节装有相互垂直的回转角传感器,可测量各个臂和测头在空间的位置。每个关节的回转中心和相应的活动臂构成一个极坐标系统,回转角即极角由传感器测量,而活动臂两端关节回转中心距离为极坐标的极径长度,可见该测量系统是由三个串连的极坐标系统组成,当测头与被测件接触时,测量系统可给出测头在空间的三维位置信息,测头与被测件在不同部位接触时,根据所建立的测量数学模型,由计算机给出被测参数实际值。
其主要特点有:
采用高精度编码器,确保仪器精度和稳定性;
采用军工品质的导电滑环,所有各关节可以无限旋转;
联机简单方便,只要通过一根USB线连接电脑即可;
宽工作温度范围,能在10℃--40℃的环境温度下可靠使用;
航空碳纤维管臂身,重量轻变形小,满足随时随地测量需求(重量仅7Kg);
开模制造的标准关节,使工作过程高度稳定;
可配备电池模块,在无电源情况下完成现场测量,避免突然断电导致的数据丢失;
多种安装组件、Renishaw全系列测头可供选择,测头更换简单;
具有多种安装方式;三脚架、磁性表座(磁性吸盘)和U型夹等,可实现现场快速测量;
具备跬跳功能,量程不够的情况之下,配备跬跳球可以实现大量程测量
二、典型应用:
航空航天、汽车、零部件制造、工程机械及装配过程中的精密测量
模具、夹具、检具检定测量
新产品研发、首件检验、定期零件检验
工业产品、油泥模型、样件、艺术品的逆向工程